We conducted an experiment of video transmission and remote control between Okinawa and Tokyo (approximately 1600km) over the Internet using ShunCar equipped with Shunkei VTX. The Glass-to-Glass video delay from RC car to operator was 61.4ms, and the control delay from human to RC car was approximately 50ms.

Actual Remote Control Operation
Although no qualitative evaluation was conducted, we were able to control the RC car with such low latency that it was hard to believe we were operating a car 1600km away. We were able to enjoy low-latency-specific operations such as quickly applying counter-steering when the car skidded at high speeds, and intentionally drifting.
Network Environment
ShunCar (vehicle side) was set up on the Tokyo side, and the control side was set up on the Okinawa side.
We used SINET, a university network. Although no special packet routing control was performed, the route was confirmed to be approximately 6 hops, providing an environment with less jitter than normal Internet communication.
The distance is approximately 1600km in a straight line. Since the transmission speed in quartz glass optical fiber is approximately 2/3 of that in vacuum, the theoretical value is about 8ms, but in reality, the delay increases further due to queuing and buffering in routers and switches.
In this environment, the RTT was 40.5ms and the jitter was approximately 4ms. This cannot be considered an accurate evaluation due to possible different routes in Internet and mobile networks, and differences in time slot allocation in wireless sections. In this experiment, the one-way network delay was calculated by halving the RTT, but we will conduct accurate measurements in the future.

Measurement Results
We developed a device that can measure one-way Glass-to-Glass video delay (total delay including network delay from when light enters the camera to when light comes out of the display). This delay is the delay that humans actually feel during operation and is the most severe delay.
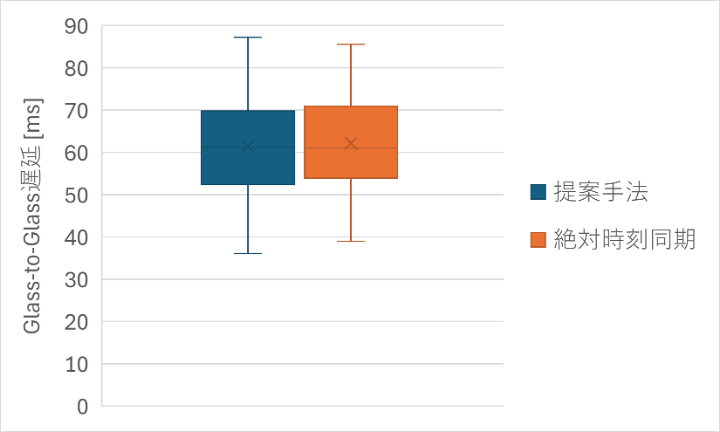
Before measurement, we confirmed that the measurement error was less than 100us by comparing with a system that performed time synchronization using GNSS.
When we performed 100 measurements using this device, the average measured value in this environment was 61.4ms, of which 20.5ms was one-way network delay.
The delay on the control side also needs to be measured. This time, we measured it with a resolution of 4.1ms by simply using high-speed camera recording.
The delay from moving the handle to IP capture, IP transmission, IP reception on the RC side, decoding, and motor signals is approximately 50ms, of which 20.5ms is one-way network delay. For accuracy, we need to measure Stick-to-Motion delay like Glass-to-Glass delay.
To Achieve Even Lower Latency
We believe that by changing the servo motor on the RC side to a coreless motor and the motor and ESC to brushless motors, we can improve responsiveness and reduce actuator delay.
Conclusion
At Shunkei, we are working on reducing the latency of the feedback loop: human → control → mobile body → video transmission → human for low-latency remote control. We are conducting research and development on low-latency IP video transmission, control, delay measurement methods, and network design. If you are interested, please contact us at info@shunkei.jp.